Traducido automáticamente por IA, leer el original
Robot autónomo para inspección submarina en desarrollo

05 septiembre 2023
Investigadores de la Universidad de Houston esperan que la tecnología reduzca el costo y el riesgo de las inspecciones.
Investigadores de la Universidad de Houston están desarrollando un robot autónomo para identificar posibles fugas en oleoductos y fallos estructurales durante las inspecciones submarinas.
La tecnología SmartTouch que se está desarrollando actualmente en la UH consiste en vehículos operados remotamente (ROV) equipados con múltiples sensores táctiles inteligentes basados en ondas de tensión, cámaras de vídeo y sonares de escaneo que pueden nadar a lo largo de un oleoducto submarino para inspeccionar los pernos de las bridas; las conexiones atornilladas han acelerado la tasa de accidentes en oleoductos que resultan en fugas, según la Oficina de Seguridad y Cumplimiento Ambiental (BSEE).
La BSEE está financiando el proyecto con una subvención de 960.493 dólares a los investigadores de la UH Zheng Chen, profesor asistente Bill D. Cook de ingeniería mecánica, y Gangbing Song, profesor John y Rebecca Moores de ingeniería mecánica, quienes trabajan en colaboración con Oceaneering International y Chevron .
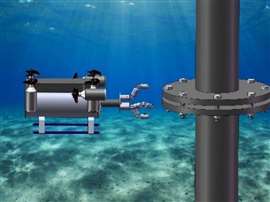 Representación gráfica de la tecnología SmartTouch actualmente en desarrollo.
Representación gráfica de la tecnología SmartTouch actualmente en desarrollo.“Al automatizar el proceso de inspección con esta tecnología robótica de vanguardia, podemos reducir drásticamente el costo y el riesgo de estas importantes inspecciones submarinas, lo que redundará en operaciones más seguras de oleoductos y gasoductos marinos, ya que se requerirá menos intervención de buzos”, afirmó Chen, quien señaló que se ha probado un prototipo del ROV en su laboratorio y en la bahía de Galveston. Los experimentos demostraron la viabilidad del método propuesto para inspeccionar la holgura de las conexiones atornilladas submarinas.
Las fugas en oleoductos y gasoductos se producen por diversas razones, como mal funcionamiento de los equipos, corrosión, inclemencias del tiempo y otras causas naturales, o accidentes relacionados con embarcaciones, que son la causa de la mayoría de las fugas importantes. Los fluidos tóxicos y corrosivos que se filtran de una tubería dañada pueden provocar una devastadora contaminación ambiental.
«La corrosión es la principal causa de las fugas pequeñas, pero sus efectos pueden ser devastadores para el medio ambiente. Por lo tanto, nuestra tecnología será altamente precisa en la monitorización de la corrosión y también ayudará a mitigar las posibilidades de fallos en los oleoductos debido a otros factores», afirmó el coinvestigador principal Gangbing Song, quien ha llevado a cabo importantes investigaciones en la monitorización de la salud estructural mediante tecnología piezoeléctrica. Sus investigaciones previas incluyen numerosas aplicaciones de detección de daños, como la detección de grietas, la monitorización de la hidratación, el desprendimiento y otras anomalías estructurales.
MAGAZINE
NEWSLETTER