



05 九月 2023
休斯顿大学的研究人员希望这项技术能够降低检测成本和风险。
休斯顿大学的研究人员正在开发一种自主机器人,用于在海底检查过程中识别潜在的管道泄漏和结构故障。
休斯顿大学目前正在开发的 SmartTouch 技术包括遥控潜水器 (ROV),配备有多个基于应力波的智能触摸传感器、摄像机和扫描声纳,可以沿着海底管道游动以检查法兰螺栓——根据安全与环境执法局 (BSEE) 的说法,螺栓连接加速了导致泄漏的管道事故的发生率。
BSEE 为该项目提供 960,493 美元的拨款,资助对象为休斯顿大学的研究人员郑晨(机械工程系比尔·D·库克助理教授)和宋刚兵(机械工程系约翰和丽贝卡·摩尔斯教授),他们与 Oceaneering International 和雪佛龙公司合作开展该项目。
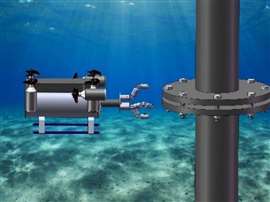 这是目前正在开发的SmartTouch技术的渲染图。
这是目前正在开发的SmartTouch技术的渲染图。陈教授表示:“通过运用这项先进的机器人技术实现检测流程自动化,我们可以大幅降低这些重要水下检测的成本和风险,从而减少人工潜水员的干预,使海上油气管道的运行更加安全。”他还指出,其实验室和加尔维斯顿湾已对ROV原型机进行了测试。实验结果表明,该方法可用于检测水下螺栓连接的松动情况。
石油和天然气管道发生故障的原因多种多样,包括设备故障、腐蚀、天气和其他自然因素,以及船舶事故(其中船舶事故是造成大多数大型泄漏事故的原因)。从受损管道泄漏的有毒腐蚀性液体会造成毁灭性的环境污染。
“腐蚀是造成大多数小型泄漏的原因,但其对环境的影响仍然可能是毁灭性的。因此,我们的技术能够非常精确地监测腐蚀情况,并有助于降低其他因素导致管道故障的风险,”共同首席研究员宋刚兵说道。他曾在压电结构健康监测领域进行过大量研究。他之前的研究工作涵盖了多种损伤检测应用,例如裂纹检测、水化监测、脱粘和其他结构异常检测。
杂志
通讯

Latest News
合作协议旨在完善“大日出”概念,包括液化天然气、国产天然气和氦气设施。
委员会就潜在的全面授权征求利益相关者的意见

“牛仔连接器”将二叠纪盆地不断增长的石油产量与墨西哥湾沿岸市场连接起来