


Traduit automatiquement par IA, lire l'original
Robot autonome pour l'inspection sous-marine en cours de développement

05 septembre 2023
Des chercheurs de l'Université de Houston espèrent que la technologie permettra de réduire les coûts et les risques liés aux inspections.
Des chercheurs de l'Université de Houston développent un robot autonome capable d'identifier les fuites potentielles de pipelines et les défaillances structurelles lors d'inspections sous-marines.
La technologie SmartTouch actuellement en développement à l'UH consiste en des véhicules télécommandés (ROV) équipés de multiples capteurs tactiles intelligents à ondes de contrainte, de caméras vidéo et de sonars de balayage qui peuvent nager le long d'un pipeline sous-marin pour inspecter les boulons de bride – les connexions boulonnées ont accéléré le taux d'accidents de pipelines qui entraînent des fuites, selon le Bureau de la sécurité et de l'application des réglementations environnementales (BSEE).
Le BSEE finance le projet avec une subvention de 960 493 $ accordée aux chercheurs de l'UH Zheng Chen, professeur adjoint de génie mécanique Bill D. Cook, et Gangbing Song, professeur de génie mécanique John et Rebecca Moores, qui travaillent en collaboration avec Oceaneering International et Chevron .
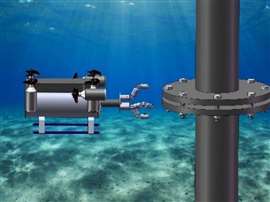 Représentation graphique de la technologie SmartTouch actuellement en développement.
Représentation graphique de la technologie SmartTouch actuellement en développement.« En automatisant le processus d'inspection grâce à cette technologie robotique de pointe, nous pouvons réduire considérablement le coût et les risques liés à ces inspections sous-marines cruciales, ce qui permettra d'améliorer la sécurité d'exploitation des oléoducs et gazoducs offshore, car l'intervention de plongeurs humains sera moins fréquente », a déclaré Chen, précisant qu'un prototype du ROV a été testé dans son laboratoire et dans la baie de Galveston. Les expériences ont démontré la faisabilité de l'approche proposée pour contrôler le serrage des assemblages boulonnés sous-marins.
Les oléoducs et gazoducs subissent des défaillances pour diverses raisons, notamment des dysfonctionnements d'équipement, la corrosion, les intempéries et autres causes naturelles, ou encore des accidents liés aux navires, qui sont à l'origine de la plupart des fuites importantes. Les fluides toxiques et corrosifs qui s'échappent d'une canalisation endommagée peuvent provoquer une pollution environnementale dévastatrice.
« La corrosion est responsable de la plupart des petites fuites, mais ses conséquences environnementales peuvent être désastreuses. C’est pourquoi notre technologie permettra une surveillance très précise de la corrosion et contribuera également à réduire les risques de rupture de pipeline dus à d’autres facteurs », a déclaré Gangbing Song, co-responsable du projet et auteur de recherches approfondies sur la surveillance de l’intégrité structurelle par piézoélectricité. Ses travaux antérieurs portent notamment sur de nombreuses applications de détection de dommages, telles que la détection de fissures, la surveillance de l’hydratation, le décollement et d’autres anomalies structurelles.
MAGAZINE
NEWSLETTER



